 自動導入(GOTO)システムの製作
自動導入(GOTO)システムの製作
少し前までは自動導入システムを自作するなどということは素人の私の技量ではとても出来ることではないと考えていました。
しかし、導入すること自体の原理はそれほど難しいものではなく単純なものだと気がついた時、市販のGOTOシステムほどの機能を求めなければ自作も夢ではなくなりました。
満足できる自動導入の速度と恒星時追尾の速度差は最低でも数百倍に達します。これを両立させることが最も困難なことですが、どちらかの要求度を緩和することで素人の自作でも実用になりそうです。ここで紹介するものは星図や目盛り環などを使って手動で導入していたものを自動導入しようとするものです。すなわち導入速度を優先して25倍程度の望遠鏡や双眼鏡の視野約2度程度に目標天体を導入し視野から外れない程度に追尾するものです。
肉眼で見えるものを望遠鏡の視野に入れるのは簡単ですが見えないものを入れるのはベテランの方でない限り結構大変です。このシステムで視野のどこかに入ればそれを中心に持ってくることは簡単です。こうして気軽にメジャーな星雲、星団などの観望を楽しむことを目的にしています。
本システムはソフトウエア、モーター機構部、モーター駆動回路、で構成されています。
ソフトウエア
パソコンから導入します。天体の方位高度計算プログラムにGOTO機能を追加したものです。基本仕様はそちらを先にお読みください。
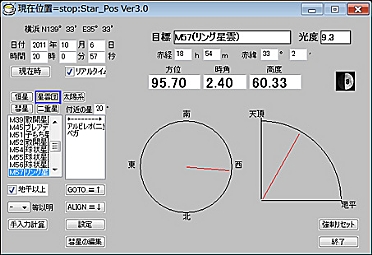
プログラムを起動すると上のような画面が現れます。
目標の天体をリストから選ぶとその天体の方位と高度を計算します。計算結果は数値だけではなく図(グラフ)でその方向を表示します。方位の図は観測者の真上(天頂)方向から見た図です。高度の図は観測者の右側から見た図です。これによって直感的に大体の方向が分かると思います。この例ではM57は西の方向(方位95.7度)を向いて天頂に向かって(高度60.33度)見上げればそこに見えることを示していますが実際は肉眼では見えないので望遠鏡を使うことになります。
セットポジションあるいは基準星を確定してから目標天体を選んでGOTOボタンを押すとそれを自動導入します。
目標天体を選ぶとその近くにある恒星が付近の星としてリストされます。これは目標天体が星雲/星団/彗星などのように暗くて見つけにくい時、いきなりそれを導入するのではなく先に付近の恒星を導入し、それを基準に目標の天体を導入するためのものです。恒星リストは概ね3等より明るい星なので見つけやすいはずです。
方位、高度の右側に月齢を表示していますが1程度の誤差はあります。
プログラム機能詳細
モーター機構部(VIXEN SP赤道儀を経緯台として使用した実験機)
ステッピングモーター(オリエンタルPK244-02A)を写真のようにアルミアングルで純正モーター取り付け位置に固定しています。モーターとウォーム軸は方位軸はギヤー(小原歯車工業DS0.5-72)で高度軸はギヤーが足りなかったので手持ちのピッチベルトで接続しています。いずれも減速なしの1:1で駆動しています。本当は2:1くらいに減速したほうがトルクが得られて良いのですが今回は導入スピード(後述)の関係で1:1としています。

その後の作例1 →ポルタ経緯台
その後の作例2→ポルタ経緯台(改)
愛知県廣野さん→ケンコーSE300D
埼玉県三井さん→VIXEN GP2赤道儀
モーター駆動回路(USB-IOはFT245と読み替えることもできます)
モーターを駆動するパルスはパソコン(プログラム)が作っています。これをモータードライバーに伝えるのがUSB-IOです。USB-IOは気軽にUSBを使って入出力周辺機器を作るのにとても便利なもので過去にインターバルタイマーなどにも応用してきました。
USB-IOは規格としてはUSB1.1とのことで、これで1.8deg/stepのステッピングモーターを回すと75RPMが最高速度となります。従ってモーターと1:1で144歯のウォームホイルを回すと
114/75=約2分 で妥協できるスピードとなります。
USB2.0のポートに接続するともっと高速回転ができる場合もあります。PCのUSBホストアダプターがNECのこれだと150RPMで回すことができます。Intelのホストアダプターでは75RPMでした。
モータードライバーとUSB-IOは一体化しています。モータードライバーは方位/高度の2つのモーターを回すため2回路入っています。ヒートシンクが大袈裟ですがこれは電源回路のもので、2つのモーター駆動時でも暖かくなる程度なのでもっと小さくても良いと思います。
 |
モータードライブ基板
これさえ製作すればいろいろなステッピングモーターをドライブできます。
新規に制作される場合はUSB-IOの代わりにFT245をお勧めします。
FT245はソフトウエアV4.0以降で使用できます。
回路図
モーターの回転方向はプログラムから変更できるようにしました。
←はUSB-IOインターフェースの作例です。 |
実際の導入方法
まずパソコンの時計が合っていることを確認します。それほど神経質になる必要はありません。
架台は極力正確に水平をあわせます。(赤道儀の場合は極軸セッティングを正確に )
望遠鏡を水平にし南に向けます。(セットポジションと呼ぶ→設定で変更できます)

ソフトを起動する前に必ずUSBケーブルを接続しておきます。
ソフトを起動したらリアルタイムと地平以上にチェックを入れます。
目標天体(最初は恒星又は惑星)を選んでGOTOボタンを押すとモーターが回転してその方向に望遠鏡が向きます(750倍速)。このときセットポジションの精度にもよりますがなんとかファインダー内に目標がとらえられる程度です。非常停止のために設けたEMSWを切るとモーター駆動はストップしウォーム軸はフリーに回せるようになりますので手動で望遠鏡視野中心に導入します。EMSWを戻すとそのまま追尾します。(ジョイパッドがある場合はモーター方向キーで微動できます) 次の目標からは25倍程度の視野(2〜3度)に導入できるはずですが梅雨空で確認がとれていません。
話が戻りますが最初の目標天体を導入する時セットポジションを使わないで既知の恒星を直接望遠鏡の視野に手動で導入してこれを基準にしてもOKです。この時はアラインボタンを押して位置を確定すればこれを次の導入の基準星に設定し追尾を開始します。
対象が星雲などの場合はなるべく近くの恒星から導入することになります。V2.2からは目標を選択するとその近くの恒星も検索しますので検索された恒星を最初に導入して視野中心に捕えたあと目標の星雲などを自動導入します。
追尾方法について
市販の自動導入システムのように常時恒星時追尾はしません。天体は望遠鏡の視野野の中を日周運動で移動しますが、ある許容範囲を超えたら補正するといったことを繰り返しています。この許容範囲(分解能)はモーターのスッテプ角とギヤー比で決まってしまいます。ここで紹介したシステムでは天体が0.05度移動したら追尾補正動作が入ります。従って高倍率にすると視野の中を行ったり来たりして煩わしいかもしれませんが、低倍率で星団などを観望するぶんには気にならないと思います。
モーターを2:1に減速すると分解能は0.025度となってより細かく補正できますが導入速度も半分になるためモーター回転速度を上げる必要がでてきます。実験では一部のUSB2.0を使用するとモーターパルス速度は4倍に上がることが分っていますがここで使用したモーターでは早すぎて脱調してしまうので2倍程度におさえています。
製作費
モーターが一番高く定価@\4,900-X2、USB-IO:\1,500-、モータードライバー部品:約\1,000-、その他ギヤー等:約\1,000-、合計\13,500-でできました。
秋葉原の元交通博物館傍のジャンク屋さんに5.V
1.8deg/step のモ-ターが\500-でありました。これを使うと\5,000-でできます。(2006/7/2記)
とりあえず室内で動作している様子です。(307KB
WMV)
自動導入テスト結果
やっと梅雨が明けて実験することができました。自宅ベランダでの実験なので東南〜西の空しか見えません。
条件・・・主望遠鏡:Pentax75SDHF 500mm アイピースLV20
倍率25 倍実視野2度、 Or9mm 倍率56倍 実視野0.8度、 2006/8/3 21:00頃
現在捉えている目標を目測で視野中央に導入してから次の目標を導入した。
| 目標 |
方位 |
高度 |
方位差 |
高度差 |
LV20 (2度) |
Or9 (0.8度) |
| セットポジション→アークトゥルス |
88.20 |
37.02 |
88.2 |
37.02 |
○ |
X |
| → アンタレス |
23.74 |
24.05 |
-64.46 |
-12.97 |
○ |
○ |
| → アルタイル |
311.84 |
54.33 |
-71.9 |
30.28 |
○ |
○ |
| → ベガ |
238.74 |
83.13 |
73.10 |
28.80 |
○ |
○ |
| アンタレス→ ベガ |
238.74 |
83.13 |
-145.00 |
59.08 |
○ |
○ |
| → スピカ |
69.34 |
9.07 |
190.60 |
-74.06 |
○ |
X |
| → アルビレオ |
286.84 |
70.65 |
-142.50 |
61.58 |
○ |
○ |
| → アルニャート |
21.68 |
22.86 |
94.84 |
-47.79 |
○ |
○ |
| → アークトゥルス |
88.2 |
37.02 |
66.52 |
14.16 |
○ |
○ |
| → アルビレオ |
286.84 |
70.65 |
-161.36 |
33.63 |
○ |
○ |
マイナス数値:方位:南から東回りでー、 高度:天頂から地平方向でー +はその逆、
セットポジション〜アークトゥルスではさすがに望遠鏡中心には無理でした。セットポジションは適当にセットしたのでこれは仕方ありません。ファインダーに入れば上出来といえます。
後は表の通り「目標の2〜3度の視野に導入」は全て成功しています。それも殆どOr9mmの視野0.8度以内に入りました。唯一ベガ→スピカはOr9mmに入りませんでした。これは移動量が大きいこともありますが、スピカの高度が9.07度と低く大気差の影響を大きく受けているためだと思います。プログラムでは大気差の補正はしていますが高度10度を切ると補正が追いつきません。
追尾精度のテスト(Or9mm)
アルタイルを視野中央に入れて15分そのまま追尾しました。15分後ほぼ視野中央を保っていた。
追尾一時停止後の再動導入テスト(Or9mm)
アルタイルを導入後、追尾を一時停止、15分後再導入・・・ほぼ視野中央に導入された。
今回の実験で感じたことですが架台の水平出しは非常に重要で、水準器で水平出しをする場合、方位軸全周にわたって水平を確認調整することが重要です。このシステムではいわゆる1点アライメントとか1スターアライメントなので架台の設置精度や水平垂直軸直交精度に委ねられています。目標の導入はやはり目標近くの基準星を導入して目標を自動導入すれば確実だと思います。
補足(水準器を使わない方法)
架台の設置は水平回転ベース部分が目測水平になるように設置します。
なるべく高度の低い既知の恒星を手動導入してアラインボタンを押します。次になるべく高度の高い恒星をリストから選んで自動導入します。三脚の高さのみを調整して望遠鏡の視野中心に近づけます。この時視野中心にこなくても決して望遠鏡を動かさないことです。
これを異なる方向で2〜3回繰り返せばかなり正確に設置できます。(各部の直交精度に依存)
(2006/08/05記 - 2011/10改)
